概述
在 Intuitive Surgical 的实习期间,我参与了一项使用达芬奇手术系统进行的超声刀冷却性能实验研究。 目标是开发一套可重复、数据驱动的框架,评估超声刀在激活后的散热表现。
我负责设计和自动化机器人辅助测试流程,集成热成像数据采集和曲线拟合模型来分析手术器械的冷却特性。 本项目综合运用了机器人学、热分析和实验数据建模技能,应用于医疗器械研发环境。
系统组成
| 组件 | 描述 |
|---|---|
| 机器人系统 | 达芬奇手术系统,编程执行精确运动序列 |
| 器械 | 不同材料和涂层的超声刀 |
| 传感器 | 热成像系统,用于表面温度监测 |
| 软件工具 | Python、OpenCV、NumPy 和曲线拟合库 |
| 工作环境 | 可控实验室条件,确保机器人实验的可重复性 |
实验工作流程
1. 机器人操作设置
- 编程控制达芬奇机器人以固定速度、路径和力执行可重复的切割与冷却序列。
- 确保接触时间、角度和运动轨迹的一致性。
- 每次试验前通过多次标定循环验证机器人精度。
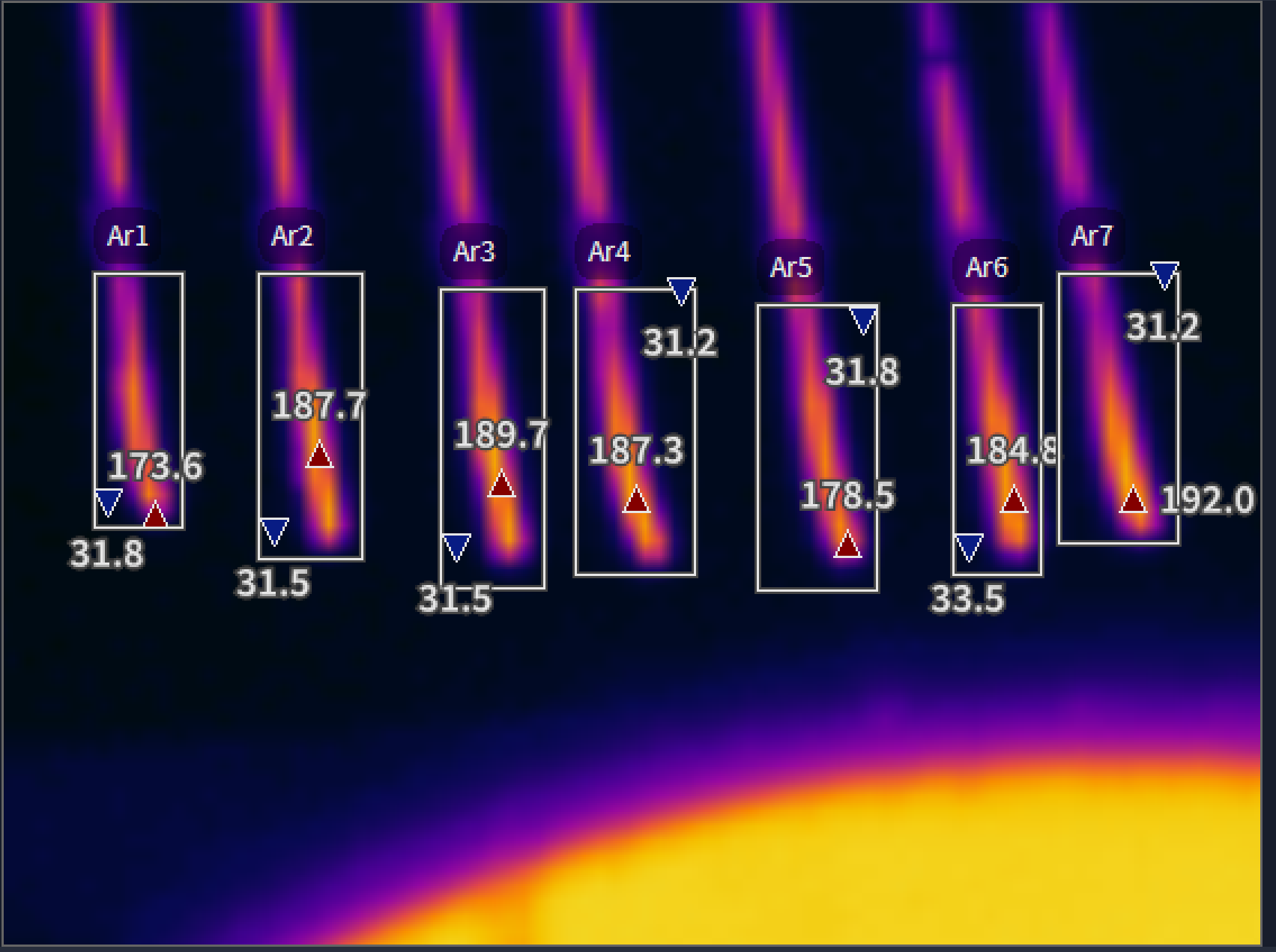
2. 热成像与数据采集
- 使用热像仪连续记录手术器械激活后的温度衰减。
- 定义观察区域以聚焦分析关键接触区域。
- 提取时间-温度数据序列供后续处理。
3. 数据建模与分析
- 使用 Python 处理记录的温度数据。
- 应用曲线拟合技术建模随时间变化的冷却特性。
- 实现指数衰减拟合以估计不同配置下的冷却参数。
- 通过多次重复实验对比模型精度以验证实验可靠性。
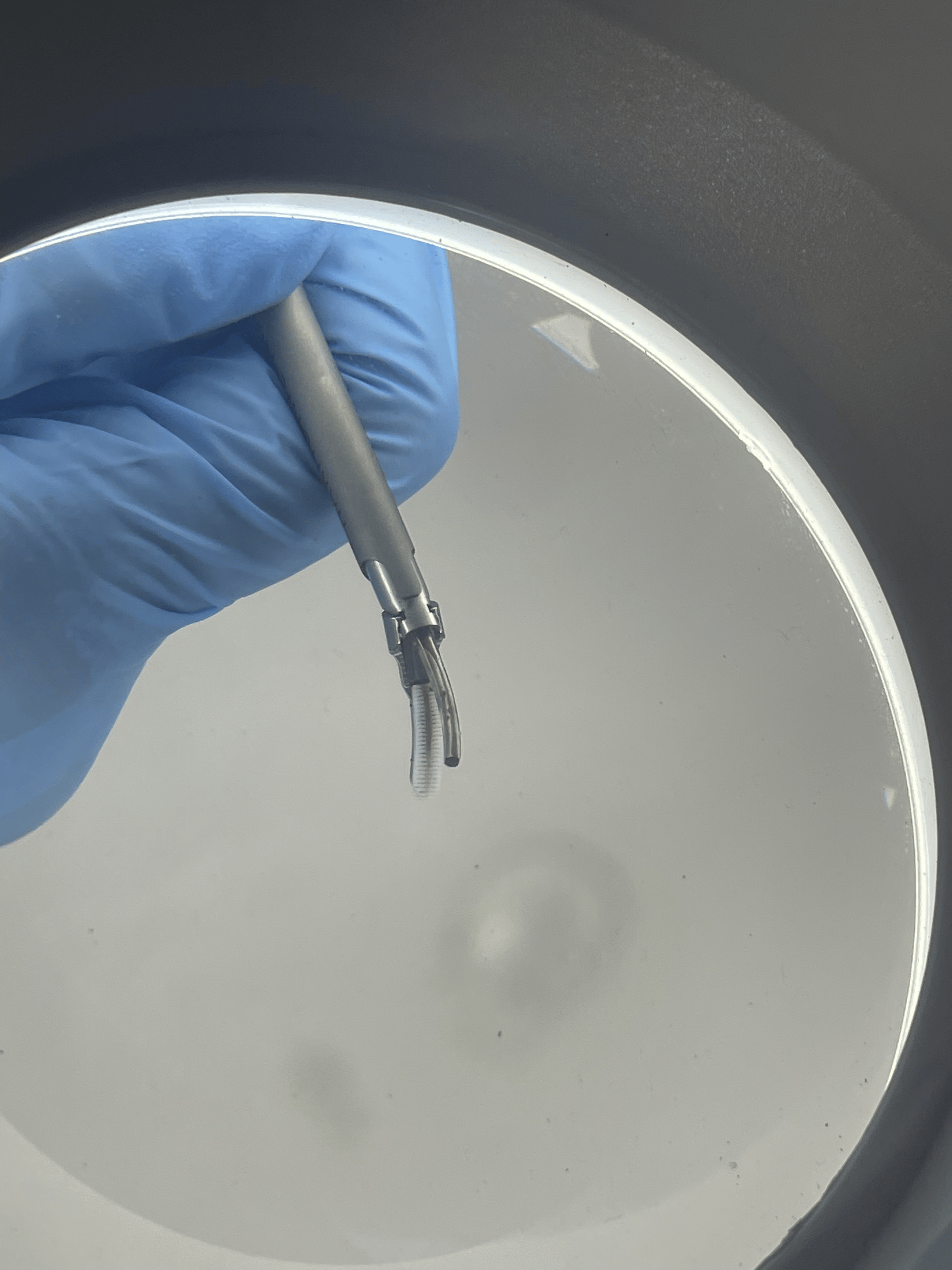
4. 器械处理与检查
- 协助每次试验的器械准备与固定。
- 每轮试验后进行显微检查,检测表面或涂层的潜在变化。
技能与贡献
- 机器人操作: 操作达芬奇手术机器人以完成实验。
- 实验设计: 规划可重复的测试条件,确保准确性和可重复性。
- 热数据分析: 使用 Python 处理和建模时间-温度数据。
- 团队协作: 在受管控的跨学科实验室环境中与研发工程师协作。
- 文档记录: 记录实验流程、设备配置和数据工作流以供内部报告。
收获
这次实习加深了我对机器人学与数据建模在医疗器械研发中交叉应用的理解。 我学会了在高风险的真实环境中运用工程原则 —— 精度、可重复性和安全性 —— 在手术机器人领域架起软件、硬件与人因工程的桥梁。
致谢
感谢 Intuitive Surgical 研发团队在实习期间的指导与帮助。 他们在机器人器械、数据验证和安全测试方面的见解极大地塑造了我的学习体验。
免责声明
本页展示的所有照片均经授权使用,仅展示非机密、适合教育用途的内容。 本项目摘要未披露 Intuitive Surgical 的任何专有数据、内部结果或知识产权。
Overview
During my internship at Intuitive Surgical, I participated in an experimental study on ultrasonic scalpel cooling performance using the da Vinci Surgical System. The goal was to develop a repeatable, data-driven framework to evaluate the thermal dissipation behavior of surgical instruments after activation.
I was responsible for designing and automating the robot-assisted test workflow, integrating thermal imaging data acquisition and curve fitting models to analyze the cooling characteristics of surgical instruments. This project combined skills in robotics, thermal analysis, and experimental data modeling, applied in a medical device R&D environment.
System Components
| Component | Description |
|---|---|
| Robot System | da Vinci Surgical System, programmed for precise motion sequences |
| Instruments | Ultrasonic scalpels with different materials and coatings |
| Sensors | Thermal imaging system for surface temperature monitoring |
| Software Tools | Python, OpenCV, NumPy, and curve fitting libraries |
| Environment | Controlled lab conditions ensuring robotic experiment repeatability |
Experimental Workflow
1. Robot Operation Setup
- Programmed the da Vinci robot to execute repeatable cutting and cooling sequences at fixed speeds, paths, and forces.
- Ensured consistency in contact time, angle, and motion trajectory.
- Verified robot accuracy through multiple calibration cycles before each trial.
2. Thermal Imaging and Data Acquisition
- Used a thermal camera to continuously record temperature decay after instrument activation.
- Defined Regions of Interest (ROI) to focus analysis on key contact areas.
- Extracted time-temperature data series for subsequent processing.
3. Data Modeling and Analysis
- Processed recorded temperature data using Python.
- Applied curve fitting techniques to model cooling characteristics over time.
- Implemented exponential decay fitting to estimate cooling parameters under different configurations.
- Validated experimental reliability by comparing model accuracy across multiple repeated trials.
4. Instrument Handling and Inspection
- Assisted with instrument preparation and fixturing for each trial.
- Conducted microscopic inspection after each round of testing to detect potential surface or coating changes.
Skills and Contributions
- Robot Operating: Operated the da Vinci Surgical System for testing.
- Experiment Design: Planned repeatable test conditions ensuring accuracy and reproducibility.
- Thermal Data Analysis: Processed and modeled time-temperature data using Python.
- Team Collaboration: Worked with R&D engineers in a regulated, interdisciplinary lab environment.
- Documentation: Recorded experimental procedures, equipment configurations, and data workflows for internal reports.
Takeaways
This internship deepened my understanding of the intersection of robotics and data modeling in medical device R&D. I learned to apply engineering principles – precision, repeatability, and safety – in a high-stakes real-world environment, bridging software, hardware, and human factors in the surgical robotics domain.
Acknowledgments
Thanks to the Intuitive Surgical R&D team for their guidance and support during the internship. Their insights on robotic instruments, data validation, and safety testing greatly shaped my learning experience.
Disclaimer
All photos shown on this page are used with permission and display only non-confidential, education-appropriate content. This project summary does not disclose any proprietary data, internal results, or intellectual property of Intuitive Surgical.