概述
谁偷了我的笔? 我的笔刚才还在这里,但是现在不见了。周围没有人 —— 只有这个机械臂。不可能是它拿走的……吧?
本项目展示了一个视觉引导机器人抓取系统,使用 RealSense 深度相机检测笔,通过相机-机器人标定计算其位置,并控制 Interbotix PX100 机械臂实时拾取 —— 全部自动完成。
项目集成了 RGB-D 感知、坐标变换和运动控制,作为视觉伺服(Visual Servoing)和机器人抓取操作的小型演示。
系统组成
| 组件 | 描述 |
|---|---|
| 机械臂 | Interbotix PX100,5 自由度,通过 ROS Python API 控制 |
| 相机 | Intel RealSense,提供同步 RGB 和深度数据流 |
| 环境 | Ubuntu 24.04 / ROS Kilted / Python 3.12 |
| 控制接口 | Interbotix Python API、OpenCV、NumPy |
工作流程
1. RGB-D 数据采集
- 从 RealSense 相机采集 RGB 和深度图像。
- 对齐两帧以确保像素级深度对应。
- 滤除距离超过 1 米的区域以减少背景干扰。
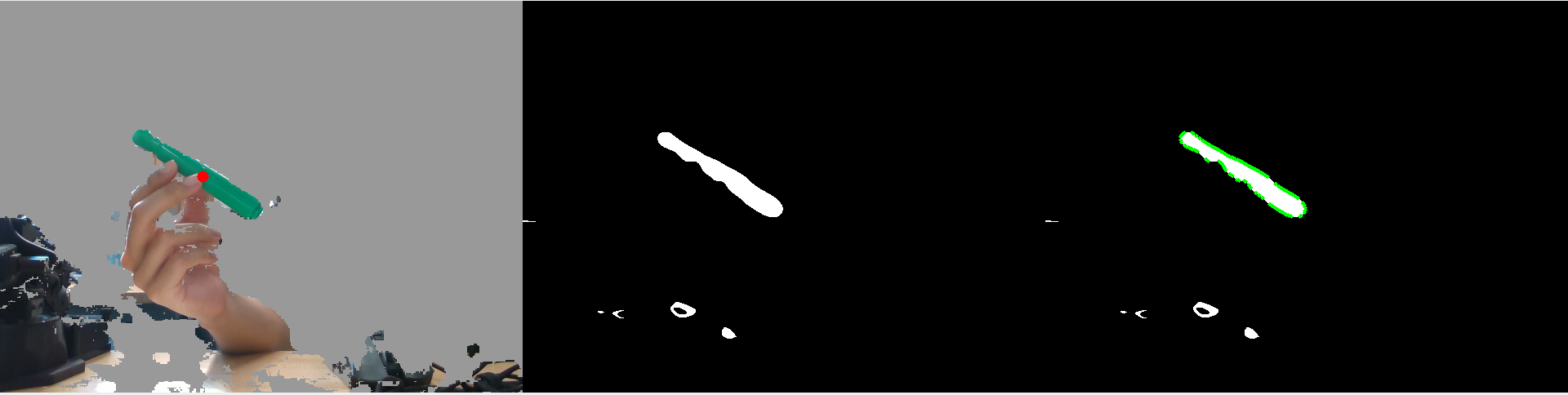
2. 基于 HSV 阈值分割的颜色检测
- 将 RGB 帧转换为 HSV 色彩空间。
- 使用 OpenCV 滑动条界面动态调整色相、饱和度和明度阈值。
- 应用高斯模糊使分割更平滑。
- 生成二值掩模以隔离笔的颜色特征。
3. 轮廓提取与质心定位
- 从二值掩模中检测所有物体轮廓。
- 选择最大轮廓 —— 对应于笔。
- 计算轮廓的质心,即笔的近似像素位置。
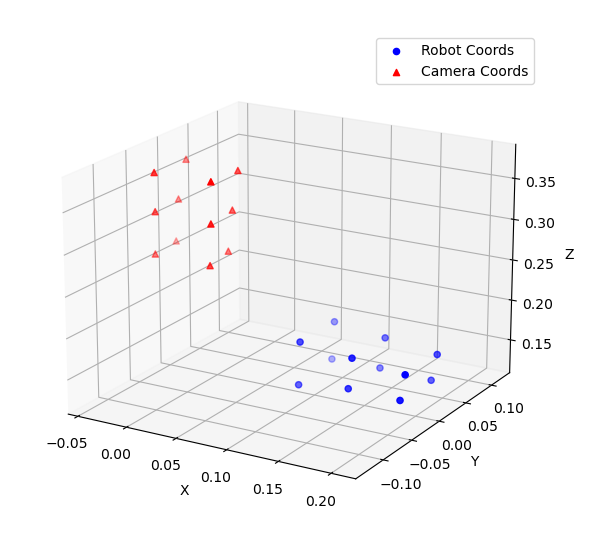
4. 相机-机器人标定
为使机器人能基于相机观测执行动作,需要建立相机坐标系与机器人坐标系之间的变换矩阵。
- 将机械臂末端执行器移动到工作空间内的 12 个已知点。
- 在机器人坐标系和相机坐标系中分别记录每个点的坐标。
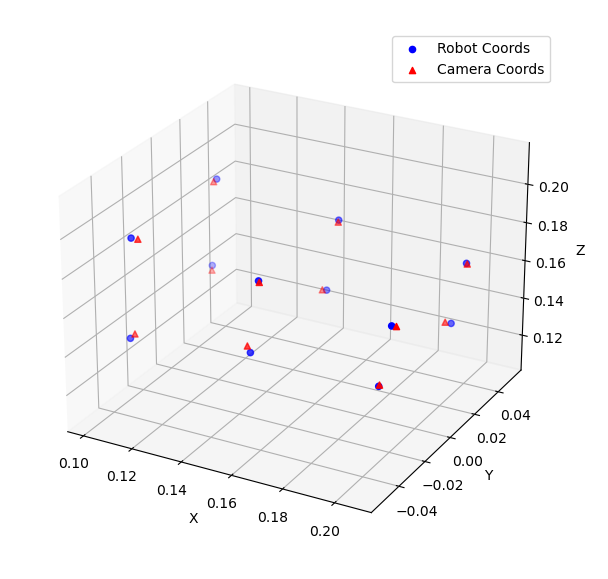
- 计算:
- 旋转矩阵 (R):通过点云之间的向量对齐。
- 平移向量 (T):通过质心偏移。
5. 笔的抓取执行
- 将检测到的笔的像素和深度数据转换为 3D 相机坐标。
- 应用标定变换计算机器人坐标。
- 控制 PX100 机械臂将末端执行器移动到计算出的位置。
- 关闭夹爪 —— 笔被成功抓取!

文件结构
| 文件 | 描述 |
|---|---|
main.py | 运行实时检测与控制流程 |
calibration.py | 计算相机-机器人变换矩阵 |
vision.py | 管理 RealSense 数据流和对齐 |
colorspace.py | 实现 HSV 阈值分割和掩模创建 |
contour.py | 检测轮廓和质心 |
position.py | 将 2D 像素位置转换为 3D 相机坐标 |
grab_pen.py | 根据变换结果执行抓取动作 |
thread.py | 演示多线程标定与控制 |
Rotation_mat.txt、Translation_mat.txt | 保存的变换矩阵 |
citation.txt | 参考文献与算法引用 |
致谢
本项目作为美国西北大学黑客马拉松的一部分,在 Matthew Elwin 教授的指导和框架设计下开发完成。 他的指导和课程资料为将计算机视觉、机器人标定和运动控制集成为一个完整系统奠定了基础。 特别感谢西北大学 2025 级机器人学硕士同学们的协作与支持,极大地丰富了开发过程。
Overview
Who Stole My Pen? The pen was right here a moment ago, and now it’s gone. Nobody is around – just the robot arm. It couldn’t have taken it… right?
This project demonstrates a vision-guided robotic grasping system that uses an Intel RealSense depth camera to detect a pen, computes its position through camera-robot calibration, and controls an Interbotix PX100 robot arm to pick it up in real time – all fully automated.
The project integrates RGB-D perception, coordinate transformation, and motion control as a compact demonstration of visual servoing and robotic grasping.
System Components
| Component | Description |
|---|---|
| Robot Arm | Interbotix PX100, 5-DOF, controlled via ROS Python API |
| Camera | Intel RealSense, providing synchronized RGB and depth streams |
| Environment | Ubuntu 24.04 / ROS Kilted / Python 3.12 |
| Control Interface | Interbotix Python API, OpenCV, NumPy |
Workflow
1. RGB-D Data Acquisition
- Captures RGB and depth images from the RealSense camera.
- Aligns both frames to ensure pixel-level depth correspondence.
- Filters out regions beyond 1 meter to reduce background interference.
2. HSV Thresholding for Color Detection
- Converts the RGB frame to HSV color space.
- Uses an OpenCV trackbar interface to dynamically adjust hue, saturation, and value thresholds.
- Applies Gaussian blur for smoother segmentation.
- Generates a binary mask to isolate the pen’s color features.
3. Contour Extraction and Centroid Detection
- Detects all object contours from the binary mask.
- Selects the largest contour – corresponding to the pen.
- Computes the contour’s centroid, the approximate pixel location of the pen.
4. Camera-Robot Calibration
To enable the robot to act on camera observations, a transformation matrix between the camera frame and robot frame must be established.
- Moves the robot end-effector to 12 known points in the workspace.
- Records coordinates in both robot frame and camera frame.
- Computes:
- Rotation Matrix (R): via vector alignment between point clouds.
- Translation Vector (T): via centroid offset.
5. Pen Grasping Execution
- Converts the detected pen’s pixel and depth data into 3D camera coordinates.
- Applies the calibration transform to compute robot coordinates.
- Commands the PX100 arm to move the end-effector to the computed position.
- Closes the gripper – pen caught red-handed!
File Structure
| File | Description |
|---|---|
main.py | Runs the real-time detection and control pipeline |
calibration.py | Computes camera-robot transformation matrix |
vision.py | Manages RealSense data streams and alignment |
colorspace.py | Implements HSV thresholding and mask creation |
contour.py | Detects contours and centroids |
position.py | Converts 2D pixel positions to 3D camera coordinates |
grab_pen.py | Executes grasping based on transformation results |
thread.py | Demonstrates multi-threaded calibration and control |
Rotation_mat.txt, Translation_mat.txt | Saved transformation matrices |
citation.txt | References and algorithm citations |
Acknowledgments
This project was developed as part of the Northwestern University Hackathon, under the guidance and framework design of Prof. Matthew Elwin. His instruction and course materials laid the foundation for integrating computer vision, robot calibration, and motion control into a complete system. Special thanks to the Northwestern MS in Robotics Class of 2025 for their collaboration and support, which greatly enriched the development process.