精选项目Featured Projects
ROS 2C++Kalman FilterObstacle AvoidancePX4
力顺从交互四旋翼无人机(LiDAR 避障功能)Force-Compliant Quadrotor with LiDAR Obstacle Avoidance
一架可沿施加外力方向移动的四旋翼无人机。通过卡尔曼滤波器仅从位置观测中估计外力,基于 LiDAR 的人工势场在保持预期运动方向的同时防止碰撞。A quadrotor that moves in the direction of applied external force. A Kalman filter estimates force from position observations alone, while a LiDAR-based potential field prevents collisions while preserving intended motion direction.
ROS 2C++EKF SLAMLiDARLocalization
EKF SLAM:TurtleBot3 实体机器人实现EKF SLAM on a Real TurtleBot3
在真实 TurtleBot3 上运行的扩展卡尔曼滤波器 SLAM 管线,通过 LiDAR 扫描聚类与圆拟合检测圆柱形路标,使用马氏距离进行未知数据关联,位姿误差从里程计的 0.657 m 降至 SLAM 的 0.001 m。A full EKF SLAM pipeline running on a real TurtleBot3 — cylindrical landmark detection via LiDAR clustering and circle fitting, unknown data association with Mahalanobis distance, reducing pose error from 0.657 m (odometry) to 0.001 m.
ROS 2PythonRobot ManipulationMotion PlanningComputer Vision
基于视觉引导的 Franka 机械臂多米诺骨牌摆放Vision-Guided Domino Placement with Franka Emika Robot
基于视觉的机器人操作系统,可在 ROS 2 环境下使用 Franka Emika 机械臂检测多米诺骨牌位置、规划碰撞感知轨迹并自主完成骨牌摆放。A vision-based robotic manipulation system that detects domino positions, plans collision-aware trajectories, and autonomously places dominoes using a Franka Emika robot arm under ROS 2.
其他项目Other Projects

PythonComputer VisionPath PlanningRobot Control
谁偷了我的笔?—— 视觉引导机械臂抓取Who Stole My Pen? -- Vision-Guided Robot Pen Grasping
机械臂通过图像处理(相机标定、掩模处理、质心检测)检测笔的位置,规划抓取路径,拾取笔并返回初始位置。A robot arm detects pen position through image processing (camera calibration, mask processing, centroid detection), plans a grasping path, picks up the pen, and returns to initial position.
PythonSymPyDynamicsImpact ModelingHybrid Systems
碰撞感知动力学仿真(Box-Jack 系统)Impact-Aware Dynamics Simulation: SymPy-Based Box-Jack System
基于 SymPy 符号推导的混杂动力学仿真器,包含单面接触约束和非弹性碰撞速度修正,通过 Plotly 动画和时间序列分析进行验证。A hybrid dynamics simulator built with SymPy symbolic derivation, featuring unilateral contact constraints and inelastic impact velocity updates, validated through Plotly animations and time-series analysis.
RoboticsExperiment DesignData ModelingMedical Devices
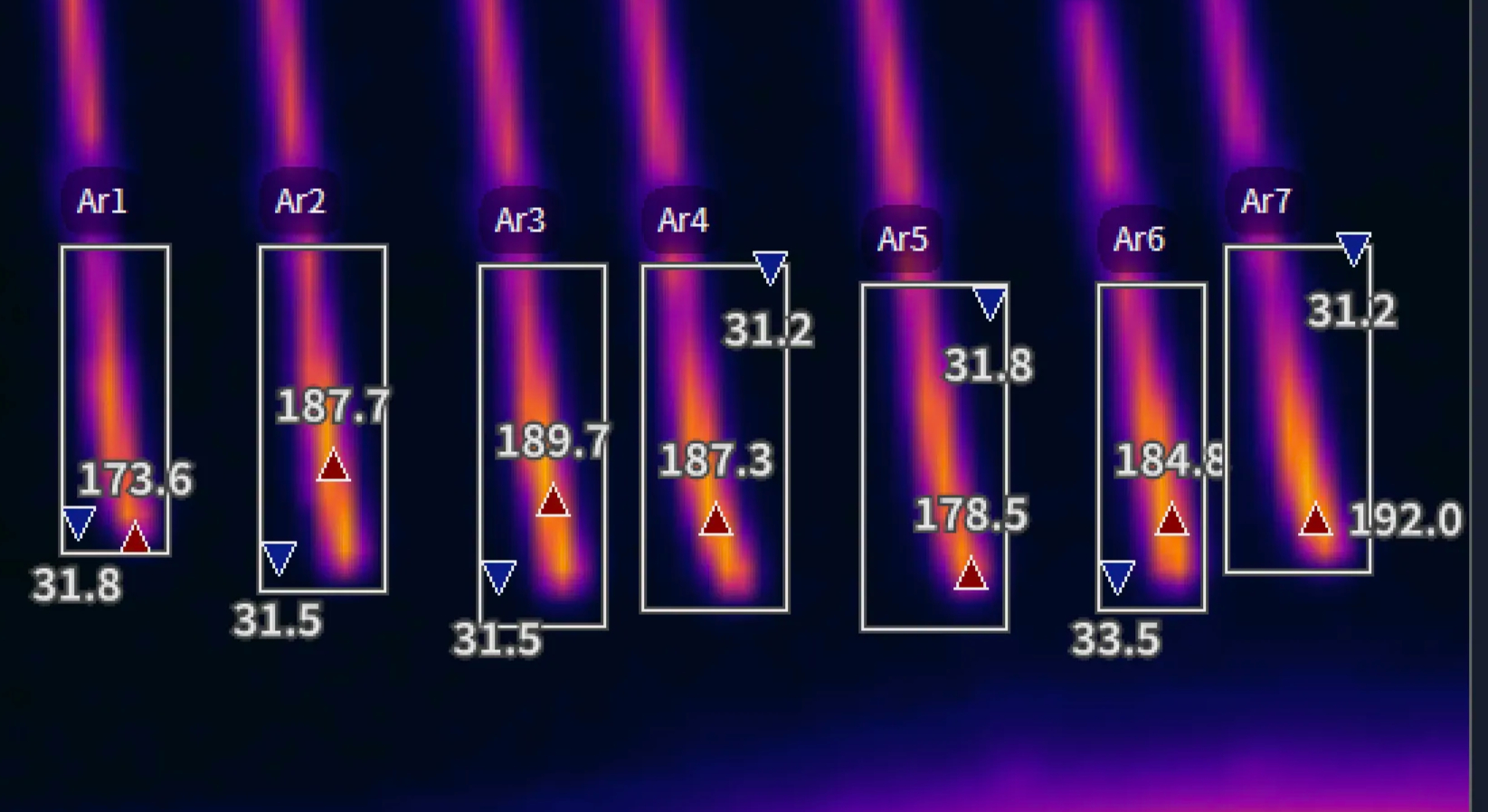
机器人手术器械热性能实验研究Thermal Performance Study of Robotic Surgical Tools
使用达芬奇手术系统对超声手术器械热性能进行的实验研究,重点分析不同涂层和材料下的冷却特性。An experimental study on the thermal performance of ultrasonic surgical instruments using the da Vinci Surgical System, focusing on cooling characteristics under different coatings and materials.
Medical DevicesMechanical DesignPatentBiomechatronics
球囊折叠机构(实用新型专利)Balloon Folding Mechanism (Utility Model Patent)
设计了一种用于冷冻消融导管的新型可折叠球囊机构。利用金属丝和鞘管开发球囊折叠机构,可沿预折痕区域实现可控折叠,提高回缩安全性。该设计已获授权专利 CN220988900U。Designed a novel foldable balloon mechanism for cryoablation catheters. Developed a balloon folding mechanism using wires and sheaths for controlled folding along pre-creased regions, improving retraction safety. Granted patent CN220988900U.
PythonReinforcement LearningSimulationOptimization
基于强化学习的基站优化Reinforcement Learning for Base Station Optimization
对比多种强化学习算法(DQN, DDPG, TD3, MADDPG, Greedy, Conservative),联合优化蜂窝基站网络的吞吐量与能耗。Comparing multiple reinforcement learning algorithms(DQN, DDPG, TD3, MADDPG, Greedy, Conservative) to jointly optimize throughput and energy consumption for cellular base station networks.